


水文缆道动力和机械传动装置。动力由两个交流电机组成,一个是负责铅鱼升降的起重电机;另一个是负责铅鱼水平运动的循环电机。这两个电机带动机械减速装置实现力的传递使铅鱼可以停留或运行在水道断面的任何位置。
该绞车适用于年测次在70次以上、铅鱼重量350kg以上、要求传动力矩大、过载能力强、耐冲击、寿命长的水文站。
绞车由电机、减速机、卷绳筒、基座和计数传感器组成。
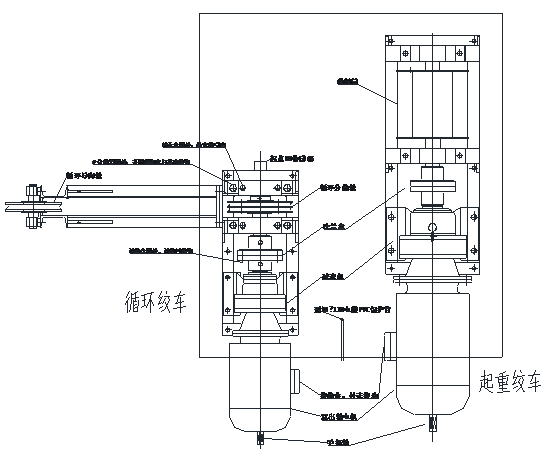
图1:水文绞车结构形式图

为了流速仪缆道信号的传输,其中将循环绞车分线器的四个固定螺栓以及法兰盘进行绝缘处理,使分线轮与减速机、绞车基座绝缘。悬索信号线接在分线器的轴承盒上。绞车的其它部位均与建筑物的等电位端子接通。
选用变极多速电磁制动双出轴三相异步电动机,且在电动机的后端与风扇间附加一个直流电磁制动器,达到快速制动和准确定位的目的,从而免除单独的制动装置,使绞车结构更为简洁。循环电机设计为4KW,起重电机设计为11KW。手摇装置设置在电机尾端的出轴上。
选用行星摆线针轮减速机,该减速机是一种应用行星传动原理,采用摆线针齿啮合的减速机构。它具有减速比大、传动效率高、体积小、重量轻、故障少、寿命长、运转平稳可靠、噪音小、拆装方便、容易维修、结构简单、过载能力强、耐冲击、惯性力矩小等特点。根据缆道设计成果,循环减速机驱动能力设计300kg,起重减速机驱动能力设计为1000kg。
绞车卷筒尺寸由与之连接的钢丝绳直径确定。工作索直径为7.7mm,绞车卷筒直径取180mm,长度400mm,多层卷绳的容绳量80m,挡板直径不小于280mm,与之配套的转向滑轮直径为260mm。
(1)电机
◆ 形式:变极多速电磁制动三相异步电动机
◆ 功率:循环4KW,起重11KW
◆ 转速:1500转/分
◆ 接法:△/YY
◆ 电动机外壳防护等级为IP44,电磁制动器为IP21。
◆ 电动机冷却方法:CO141。
◆ 电磁制动器:有。
◆ 安装结构形式:B5。
(2)减速机
◆ 形式:行星摆线针轮
◆ 输入功率:起重11KW,循环4KW
◆ 传动比:起重17,循环11
(3)其它
◆ 水平最大运行速度:120m/Min.
◆ 垂直最大运行速度:50m/Min.
◆ 海拔高度:1000m。
◆ 环境空气温度:-15℃~40℃。
◆ 相对湿度:90%。
◆ 手摇装置:有

该绞车由我公司委托生产厂家定制,主要指标如下:
|
型号 |
SWK-400(380V) |
|||
|
外形尺寸 |
800(滚筒轴线方向)×770(出绳方向)×620(高) |
|||
|
整体重量 |
500kg |
|||
|
安装孔尺寸 |
730(滚筒轴线方向)×680(出绳方向) |
|||
|
安装孔厚度 |
90mm |
|||
|
安装孔直径 |
φ22mm |
|||
|
地脚螺栓尺寸 |
M20×500(精确定位)M18×500(通用) |
|||
|
地脚螺栓露出基面高度 |
不小于120mm |
|||
|
起重滚筒中心线至绞车底部高 |
475mm |
|||
|
手摇装置 |
手动离合手摇装置 |
|||
|
水平运行部分 |
电机 |
型号 |
YEJ2-100L2-4 |
|
|
功率 |
3KW |
|||
|
电压 |
380VAC50Hz |
|||
|
电流 |
11.3A |
|||
|
转速 |
1410r/min |
|||
|
启动方式 |
Y |
|||
|
制动力矩 |
30N.m |
|||
|
制动方式 |
电磁制动 |
|||
|
电机重量 |
41kg |
|||
|
防护等级 |
IP54 |
|||
|
|
生产厂家 |
苏州德能电机有限公司 |
||
|
电磁制动器 |
线圈型号 |
DZS |
||
|
整流 |
模块型号 |
ZLKS1-99-6 |
||
|
输入电压 |
220VAC50Hz |
|||
|
输出电压 |
99VDC |
|||
|
循环 分线轮 |
直径 |
φ159 |
||
|
周长 |
0.5m |
|||
|
结构 |
双槽,槽为φ8mm半圆形,槽边沿倒圆角 |
|||
|
方向 |
订货时确定左或右、出厂后不可更改 |
|||
|
循环 导轮 |
直径 |
φ159 |
||
|
周长 |
0.5m |
|||
|
结构 |
1槽,槽为φ8mm半圆形,槽边沿倒圆角 |
|||
|
加强连杆 |
循回轮和循回导轮之间 |
|||
|
钢丝绳规格 |
5.1mm |
|||
|
水平最大行速 |
0.86m/s |
|||
|
适用最大跨度 |
800m |
|||
|
垂直升降部分 |
电机 |
型号 |
YEJ2-112M-4 |
|
|
功率 |
4KW |
|||
|
电压 |
380VAC50Hz |
|||
|
电流 |
15.4A |
|||
|
转速 |
1440r/min |
|||
|
启动方式 |
△ |
|||
|
制动力矩 |
40N.m |
|||
|
制动方式 |
电磁制动 |
|||
|
电机重量 |
52kg |
|||
|
防护等级 |
IP54 |
|||
|
|
生产厂家 |
苏州德能电机有限公司 |
||
|
电磁制动器 |
线圈型号 |
DZS |
||
|
整流 |
模块型号 |
ZLKS1-170-6 |
||
|
输入电压 |
380VAC50Hz |
|||
|
输出电压 |
170VDC |
|||
|
起重卷筒规格 |
φ159×470周长0.5m,无绳槽,直接打毛 |
|||
|
循环轮规格 |
φ159周长0.5m(用于平衡锤方式) |
|||
|
钢丝绳规格 |
5.1mm |
|||
|
升降最大速度 |
0.6m/s |
|||
|
最大起重力 |
700kg |
|||


1) 结构形式:便携式指令器+独立控制柜+独立操作台
2) 电源电压:350~460VAC
3) 交流变频器功率:台达5.5kW/380V×1
4) 变频器驱动方式:分时驱动起重循环电机
5) 变频工作频率:0~50Hz
6) 变频控制方式:V/F曲线或无感矢量控制
7) 减速止动时间:<1s
8) 水平方向位置限制值:-999.9~999.9m
9) 垂直方向位置限制值:-99.9~99.9m
10) 起点距计数显示:-99.9~999.9m,分辨力为0.01m
11) 起点距校正方式:PLC分段垂度自动连续修正
12) 水深计数显示:-9.99~99.99m,分辨力为0.01m
13) 运行速度显示:分辨力为0.01m/s
14) 起点距复位值:-999.9~999.9m
15) 指令器显示器:3寸背光液晶
16) 功能:水平、垂直控制,速度控制

1) 结构形式:便携式指令器+独立控制柜+独立操作台
2) 电源电压:350~460VAC
3) 交流变频器功率:5.5kW/380V×2
4) 变频器驱动方式:可同时驱动起重循环电机
5) 变频工作频率:0~50Hz
6) 变频控制方式:V/F曲线或无感矢量控制
7) 减速止动时间:<1s
8) 水平方向位置限制值:-999.9~999.9m
9) 垂直方向位置限制值:-99.9~99.9m
10) 起点距计数显示:-99.9~999.9m,分辨力为0.01m
11) 起点距校正方式:PLC分段垂度自动连续修正
12) 水深计数显示:-9.99~99.99m,分辨力为0.01m
13) 运行速度显示:分辨力为0.01m/s
14) 起点距复位值:-999.9~999.9m
15) 指令器显示器:3寸背光液晶
16) 功能:水平、垂直控制,速度控制

额定功率: 1000W
额定电压: AC220VAC\50-60HZ
灯 泡: 超高压球型短弧氙灯1000W
射 程: 850M-1100M
灯泡寿命: 1000小时(800小时后光衰开始)
色 温: 6500°K
防护等级: IP54
散热方式: 强迫风冷
底 座: 高强度铝合金外壳,高精度、高强度齿轮传动,断电可自锁
旋转角度:水平0~360°连续旋转,垂直角度-60°~60°
整机重量:18KG
主要功能:支持人工定位照射操作或软件自动跟随照射。

主要由光栅编码传感器和滑轮、支撑架组成,可实现对测流铅鱼的出车、回车、上提、下放的位置测量和显示。
其主要技术指标:
1) 结构形式:支架式滑轮
2) 计数抡周长:0.5m
3) 计数抡材质:尼龙
4) 编码器:光栅编码器
5) 电压:24VDC
6) 编码器输出:开路、100信号/圈
AMS水文缆道测控软件主要用于对变频控制装置和水文测控仪的控制和流量计算,是水文缆道控制系统的大脑中枢。其分为基本版和全自动版两种,其中基本版只实现对水文测控仪的控制和流量计算,全自动版实现对变频控制装置和水文测控仪的控制和流量计算等功能。

|
名称 |
指术指标 |
全自动缆道控制系统 |
半自动缆道控制系统 |
|---|---|---|---|
|
动 力 拖 动 |
水文绞车 |
带抱刹交流电机组成的集成或分体水文绞车 |
带抱刹交流电机组成的集成或分体水文绞车 |
|
水文铅鱼 |
带触底指示器的铅鱼或采样器 |
带触底指示器的铅鱼或采样器 |
|
|
结构型式 |
控制柜、指令器、操作台独立 |
控制柜、指令器、操作台独立 |
|
|
控制柜 |
1.2m*0.6m*0.6m豪华防尘电气柜 |
1.2m*0.6m*0.6m玻璃门普通网络柜 |
|
|
拖动类型 |
自动或人工操作 |
人工操作 |
|
|
速度调节 |
程序自动控制/人工调节 |
人工调节 |
|
|
保护方式 |
过电压、过电流、低电压、缺相等 |
过电压、过电流、低电压、缺相等 |
|
|
警告方式 |
蜂鸣器报警、停车 |
蜂鸣器报警、停车 |
|
|
监视视频 |
支持1路~2路视频头 |
无 |
|
|
定位方式 |
自动测点定位、手动定位 |
无 |
|
|
起点距范围 |
-999.99~999.99m |
无 |
|
|
入水深范围 |
-99.99~99.99m |
无 |
|
|
分辨率 |
0.01m |
无 |
|
|
修正方式 |
计数轮周长修正、起点距垂度动态修正 |
无 |
|
|
传感器 |
增量型光电编码器 |
无 |
|
|
保护方式 |
失速停车、限位保护、支持外接行程开关 |
无 |
|
|
起点距垂度修正 |
自动 |
无 |
|
|
中文语音提示 |
全过程自动提示 |
无 |
|
|
铅鱼入水归零 |
自动/手动 |
自动/手动 |
|
|
铅鱼触底停车 |
自动 |
自动 |
|
|
流 速 测 量 |
支持设备 |
各种转子式流速仪及相关测速仪器 |
各种转子式流速仪及相关测速仪器 |
|
测点布设 |
1-11点 |
1-11点 |
|
|
软件操作面板 |
有 |
有 |
|
|
模拟测速功能 |
有 |
有 |
|
|
测速历时设置 |
有 |
有 |
|
|
测点流速计算 |
有 |
有 |
|
|
中文语音提示 |
全过程自动提示 |
无 |
|
|
四随图表 |
垂线流速分布图、流速横向分布图 |
垂线流速分布图、流速横向分布图 |
|
|
水 深 测 量 |
支持设备 |
支持超声波测深/铅鱼测深/借用水深方式 |
无 |
|
软件操作面板 |
有 |
无 |
|
|
中文语音提示 |
全过程自动提示 |
无 |
|
|
四随图表 |
实测水深线,实时大断面示意图 |
实测水深线,实时大断面示意图 |
|
|
流 量 测 量 |
测量方式 |
全自动测流、人工测流 |
人工操作测流 |
|
数据计算 |
符合相关测验规范规定 |
符合相关测验规范规定 |
|
|
数据取舍 |
四舍五入/四舍六入 |
四舍五入/四舍六入 |
|
|
数据保存 |
paradox数据库 |
paradox数据库 |
|
|
数据备份与恢复 |
有 |
有 |
|
|
输出报表 |
A4纸打印报表,改进型流量成果表(符合相关规范) |
A4纸打印报表,改进型流量成果表(符合相关规范) |
|
|
输出电子文档 |
微软Excel电子表格或.RMP报表文档 |
微软Excel电子表格或.RMP报表文档 |
|
|
水位采集 |
是否自动采集水情RTU水位 |
是(需用户提供水情RTU通信协议) |
否 |
智能水文测验系统包含悬移质采样、缆道超声波测深和全自动缆道流量测验等三个子系统。其中调压积时式悬移质采样为“长江流域水沙产输及其与环境变化耦合机理”(973项目)中“流域水沙及环境变化特征信息监测反馈” 课题5的子课题,2002年水文上游局开始研究,2007年1月通过湖北省科技厅鉴定达到国际先进水平,其核心技术达到国际领先水平;缆道超声波测深为上游局科研专项,2002年开始研究,2007年1月通过湖北省科技厅鉴定达到国内领先水平;全自动缆道流量测验为上游局科研专项,2005年开始研究,2007年1月1日正式在北碚水文站投产使用。
智能水文测验系统是一种在计算机程序控制下以全自动方式完成流量测验、悬移质采样的综合测、控系统。在流量测量方案录入系统后,只要用鼠标点击一下开始测量,系统则全自动运行,包括自动采集水位、垂线水深、测点流速等水文要素,测量完成后立即打印流量成果;在悬移质采样方案录入系统后,系统自动采集断面混合水样。该系统包含了水、流、含等水文要素的全自动测验,代表了目前水文测验常规方式的最高水平。